Continual Learning from Simulated Interactions via Multitask Prospective Rehearsal for Bionic Limb Behavior Modeling es la idea central de un paper reciente que merece la atención de la comunidad de robótica asistiva. El estudio presenta un método para predecir la cinemática del miembro inferior a partir de demostraciones humanas en marcha, rampas y escaleras. Más importante aún, el modelo sigue aprendiendo cuando cambian las condiciones. Esto resulta muy relevante para investigadores que trabajan en control adaptativo, asistencia robótica e interacción humano-robot. También muestra por qué siguen siendo esenciales las plataformas experimentales flexibles en este campo.
El método propuesto se basa en una estrategia llamada multitask prospective rehearsal. En términos simples, el modelo genera estimaciones futuras del movimiento a partir de predicciones previas y las utiliza para mejorar su rendimiento posterior. Como resultado, puede conservar conocimiento mientras se adapta a nuevas tareas. Este es un problema clave en el control locomotor, donde suele aparecer distribution shift entre el entrenamiento y el despliegue real. Por tanto, el artículo aborda una dificultad que muchos grupos encuentran al pasar de datasets controlados a sistemas robóticos reales.
Del aprendizaje continuo a la predicción robusta
Uno de los puntos más sólidos del paper es su énfasis en la robustez. Los autores no se limitan a comparar modelos en condiciones ideales. También evalúan el método con ruido en las señales, distribution shift y perturbaciones adversarias. En todos estos casos, la propuesta supera a varios baselines bien conocidos. Entre ellos se incluyen métodos clásicos de rehearsal, estrategias de regularización y enfoques de continual learning basados en replay. En consecuencia, el trabajo refuerza el valor de continual learning for bionic limb behavior modeling en escenarios asistivos realistas.
El valor de estos resultados se aprecia aún más en robótica de rehabilitación. Las condiciones experimentales rara vez permanecen estables entre sujetos, sesiones o entornos. Al contrario, son frecuentes los cambios en la marcha, el timing o la calidad de los sensores. Por esa razón, la predicción robusta importa tanto como la precisión bruta. Un método que solo funciona bien en condiciones de laboratorio tiene un valor traslacional limitado. Este paper va más allá de esa limitación.
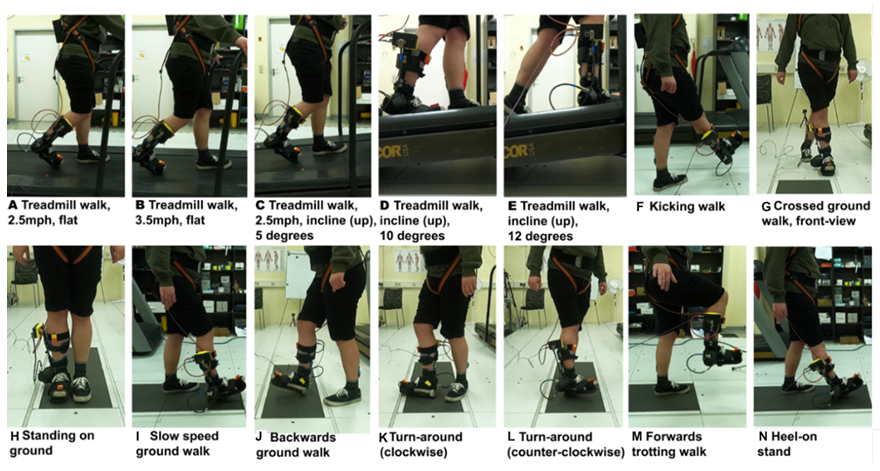
Por qué importa para la investigación en exoesqueletos
Aunque el estudio se centra en miembros biónicos, su relevancia para la investigación con exoesqueletos es evidente. El modelo predice trayectorias articulares con mayor estabilidad y mejor generalización. Además, los autores describen un estudio de despliegue real con un exoesqueleto de tobillo (Ankle-H3). Los sujetos percibieron la asistencia predicha como oportuna, precisa y sincronizada con su movimiento residual. El estudio también reporta un comportamiento cinemático más estable mediante medidas de dinámica no lineal como el exponente de Lyapunov.
Para los investigadores, aquí es donde el paper resulta especialmente útil. Conecta aprendizaje automático avanzado con validación robótica real. Ese puente es crítico. Las nuevas ideas de control necesitan plataformas hardware que permitan integrar algoritmos propios, sensórica diversa y ensayos experimentales repetidos. En otras palabras, continual learning for bionic limb behavior modeling no es solo una aportación de machine learning. También es un recordatorio de que el progreso en robótica asistiva depende de dispositivos robóticos versátiles y preparados para investigación.