Continual Learning from Simulated Interactions via Multitask Prospective Rehearsal for Bionic Limb Behavior Modeling is the core idea behind a recent paper that deserves attention from the assistive robotics community. The study presents a method for predicting lower-limb kinematics from human demonstrations across walking, ramps and stairs. More importantly, the model keeps learning as conditions change. This is highly relevant for researchers working on adaptive control, robotic assistance and human–robot interaction. It also shows why flexible experimental platforms remain essential in this field.
The proposed method is based on a strategy called multitask prospective rehearsal. In simple terms, the model generates future motion estimates from previous predictions and uses them to improve later performance. As a result, it can retain knowledge while adapting to new tasks. This is a key issue in locomotion control, where distribution shift often appears between training and deployment. Therefore, the paper addresses a problem that many research groups face when they move from controlled datasets to real robotic systems
From continual learning for bionic limb to robust predicition
One of the strongest points of the paper is its emphasis on robustness. The authors do not only compare models under ideal conditions. They also test the method under signal noise, distribution shift and adversarial perturbations. In all these cases, the proposed approach performs better than several well-known baselines. These include classical rehearsal methods, regularization strategies and replay-based continual learning methods. Consequently, the paper makes a strong case for continual learning for bionic limb behavior modeling in realistic assistive scenarios.
The value of these results becomes even clearer in rehabilitation robotics. Experimental conditions rarely stay constant across subjects, sessions or environments. Instead, changes in gait, timing and sensor quality are common. For that reason, robust prediction matters as much as raw accuracy. A method that performs well only in stable laboratory conditions has limited translational value. This paper moves beyond that limitation.
Why this paper matters for exoskeleton research
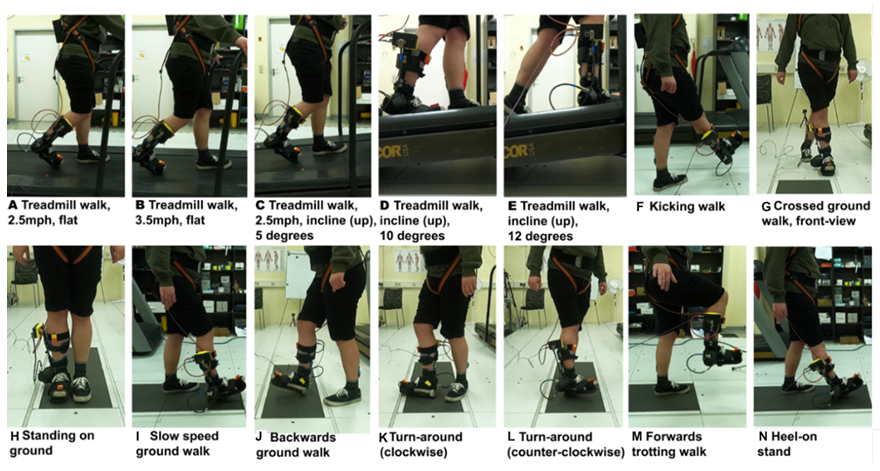
Although the study focuses on bionic limbs, its relevance for exoskeleton research is obvious. The model predicts joint trajectories with greater stability and better generalization. In addition, the authors report a real deployment study with an ankle exoskeleton (Ankle-H3). Subjects described the predicted assistance as timely, accurate and synchronized with their residual motion. The study also reports more stable kinematic behavior through nonlinear dynamics measures such as the Lyapunov exponent.
For researchers, this is where the paper becomes especially useful. It connects advanced machine learning with real robotic validation. That bridge is critical. New control ideas need hardware platforms that support custom algorithms, sensor integration and repeated experimental testing. In other words, continual learning for bionic limb behavior modeling is not only a machine learning contribution. It is also a reminder that progress in assistive robotics depends on versatile and research-ready robotic devices..